|
Yi-Lin Wei | 卫奕霖 I am a Ph.D. student in computer science at iSEE Lab, advised by Prof. Wei-Shi Zheng. Before that, I obtained my M.S. in control science and engineering from Southeast University advised by Prof. Dan Niu. And I obotained B.S. in automation from Northeastern University. |

|
ResearchI'm interested in robotics AI, specially in dexterous grasp and manipulation. Additionally, I maintain a strong interest in and active engagement with humanoid robotics, MLLM-driven manipulation and dexterous hand hardware. |
News |
- [2026-06] One paper accepted in ECCV 2026.
- [2026-04] One paper accepted in RSS 2026.
- [2026-02] Two papers accepted in CVPR 2026.
- [2026-01] One paper accepted in ICRA 2026.
- [2025-12] One paper accepted in Neurocomputing.
- [2025-11] One paper accepted in AAAI 2026.
- [2025-08] One paper accepted in CoRL 2025.
- [2025-06] One paper accepted in IROS 2025.
- [2025-06] Three papers accepted in ICCV 2025.
- [2025-02] One paper accepted in CVPR 2025.
- [2024-09] One paper accepted in NeurIPS 2025.
- [2024-09] One paper accepted in CoRL 2025.
- [2024-07] One paper accepted in ECCV 2024.
- [2024-02] Two papers accepted in CVPR 2024.
Selected PublicationsIn the following, I completed the highlight papers as a core contributor. |
|
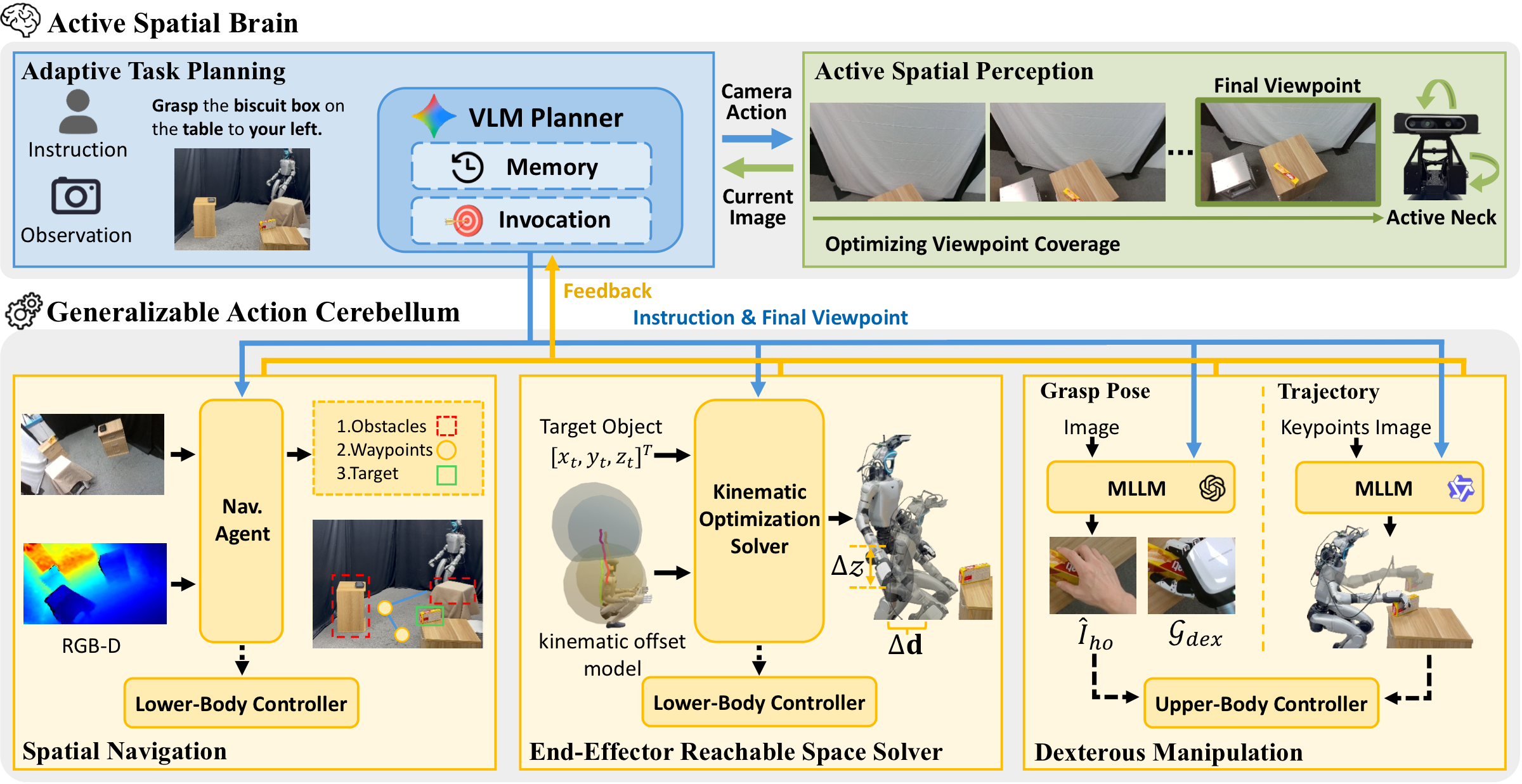
Humanoid Whole-Body Manipulation via Active Spatial Brain and Generalizable Action Cerebellum
A generalizable humanoid loco-manipulation framework that combines Active Spatial Brain for spatial perception and planning with Generalizable Action Cerebellum for executable whole-body robot actions.
|
|
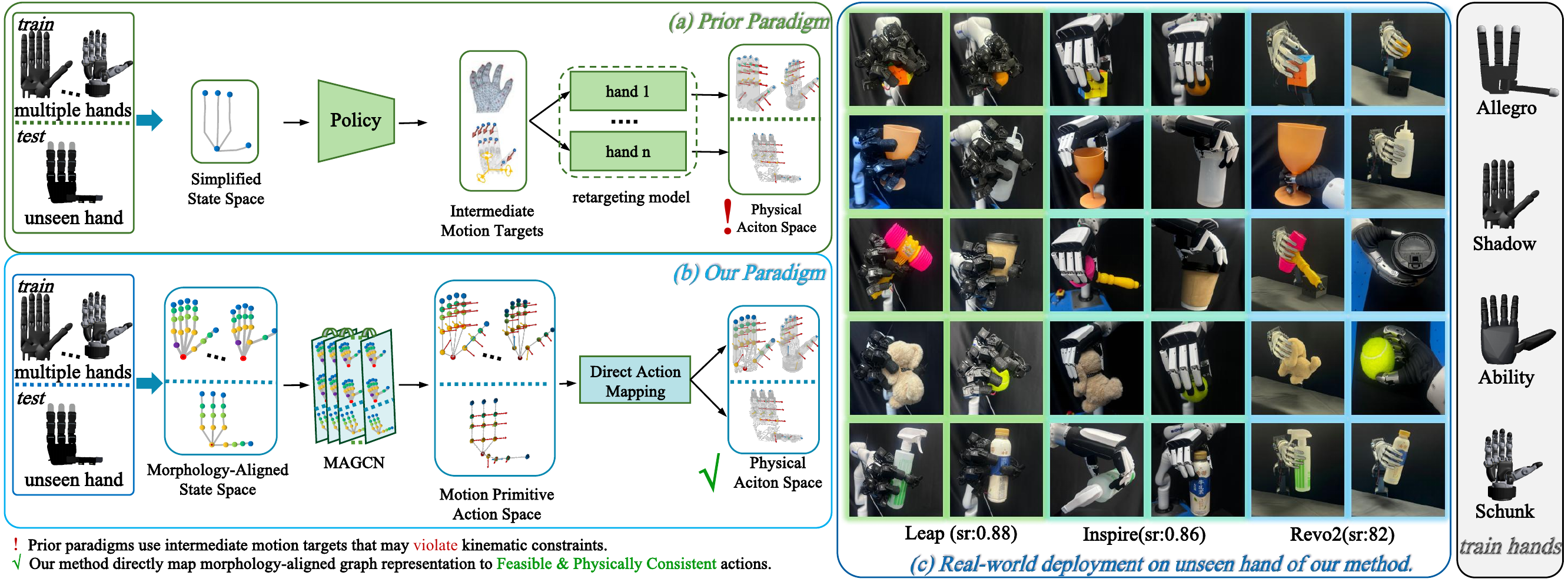
DexGrasp-Zero: A Morphology-Aligned Policy for Zero-Shot Cross-Embodiment Dexterous Grasping
A morphology-aligned graph convolutional policy that learns universal dexterous grasping from diverse embodiments, enabling zero-shot transfer to unseen robot hands with 85% success rate.
|
|
BiDexGrasp: Coordinated Bimanual Dexterous Grasps across Object Geometries and Sizes
A large-scale bimanual dexterous grasping dataset and a geometry-size-adaptive grasping generation model.
|
|
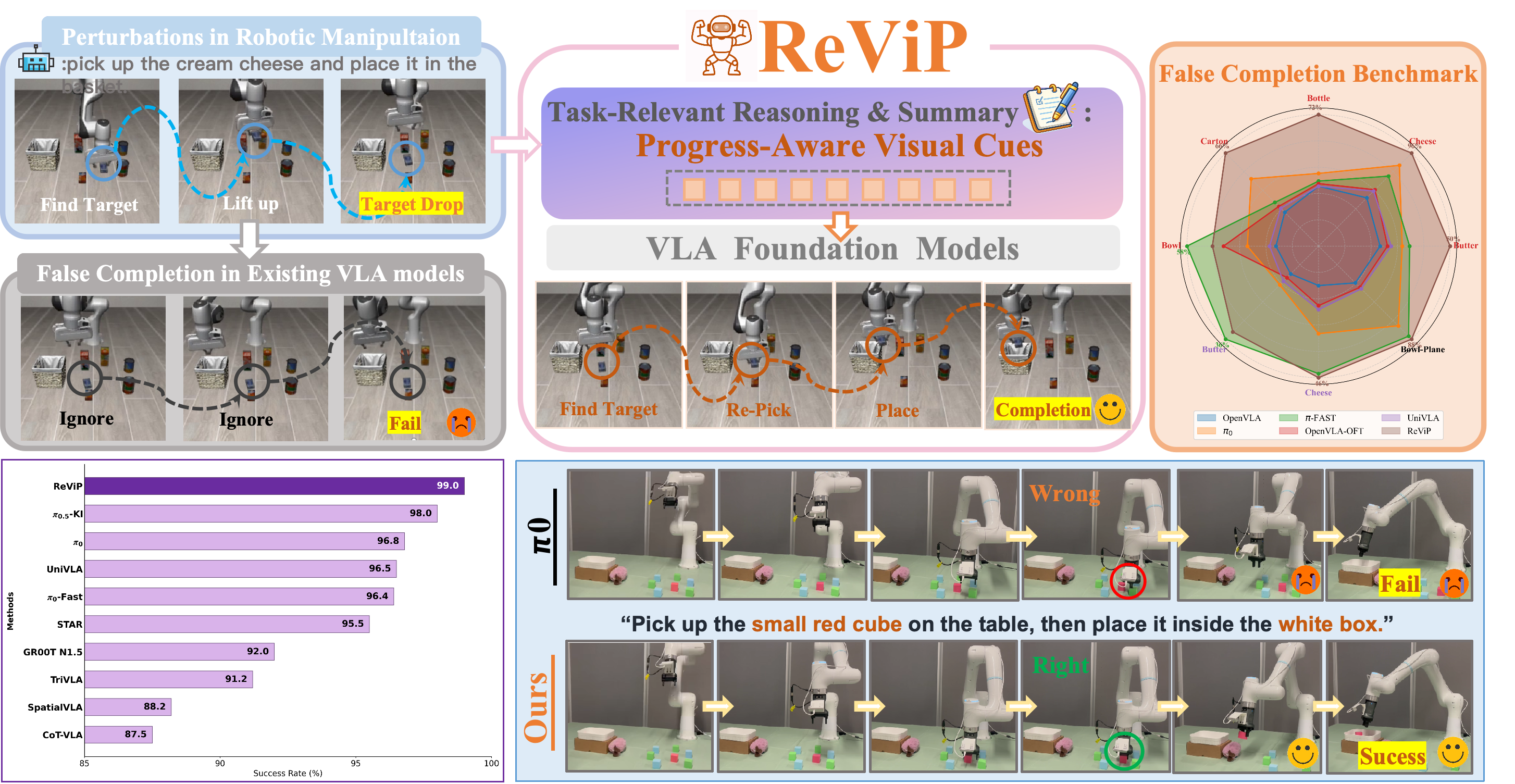
ReViP: Mitigating False Completion in Vision-Language-Action Models with Vision-Proprioception Rebalance
Mitigating false task completion in VLA models by rebalancing vision and proprioception signals.
|
|
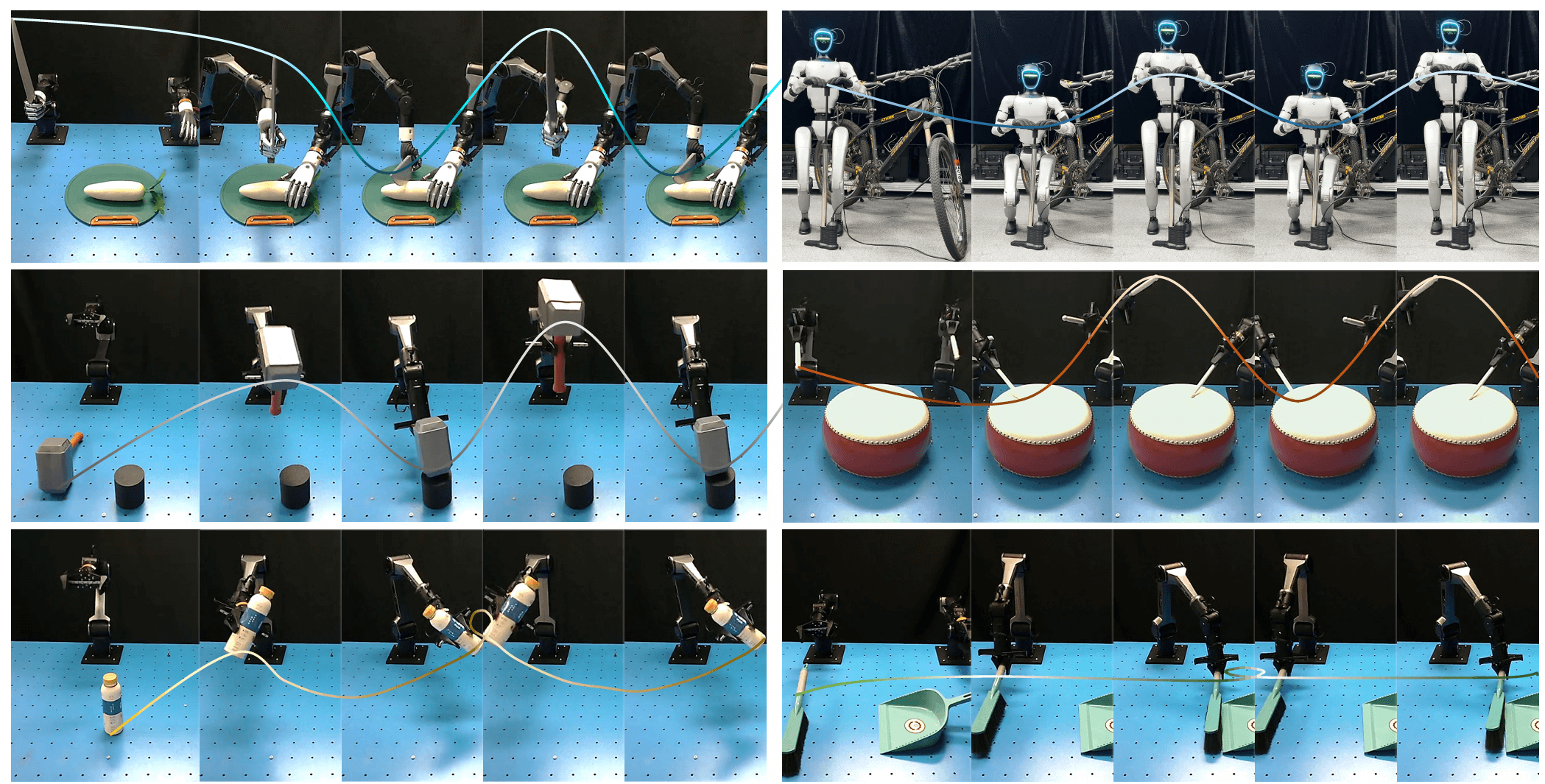
CycleManip: Enabling Cycle-based Manipulation via Effective History Perception and Understanding
CVPR 2026 Highlight
Achieving cyclic manipulation tasks in an end-to-end imitation manner, without relying on auxiliary models or incurring heavy computational overhead.
|
|
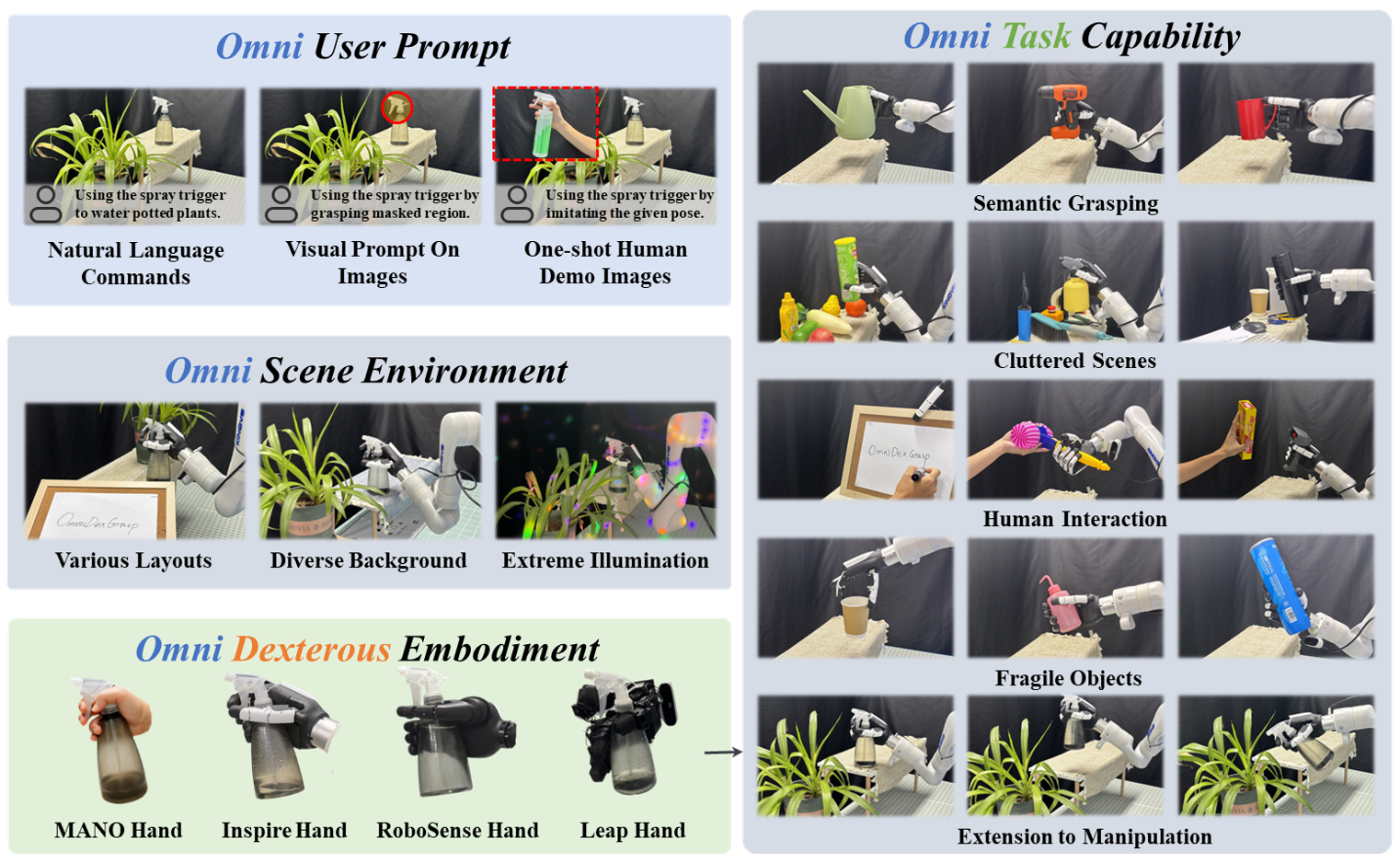
OmniDexGrasp: Generalizable Dexterous Grasping via Foundation Model and Force Feedback
A generalizable dexterous framework that achieves omni-capabilities in user prompting, dexterous embodiment, and grasping tasks.
|
|
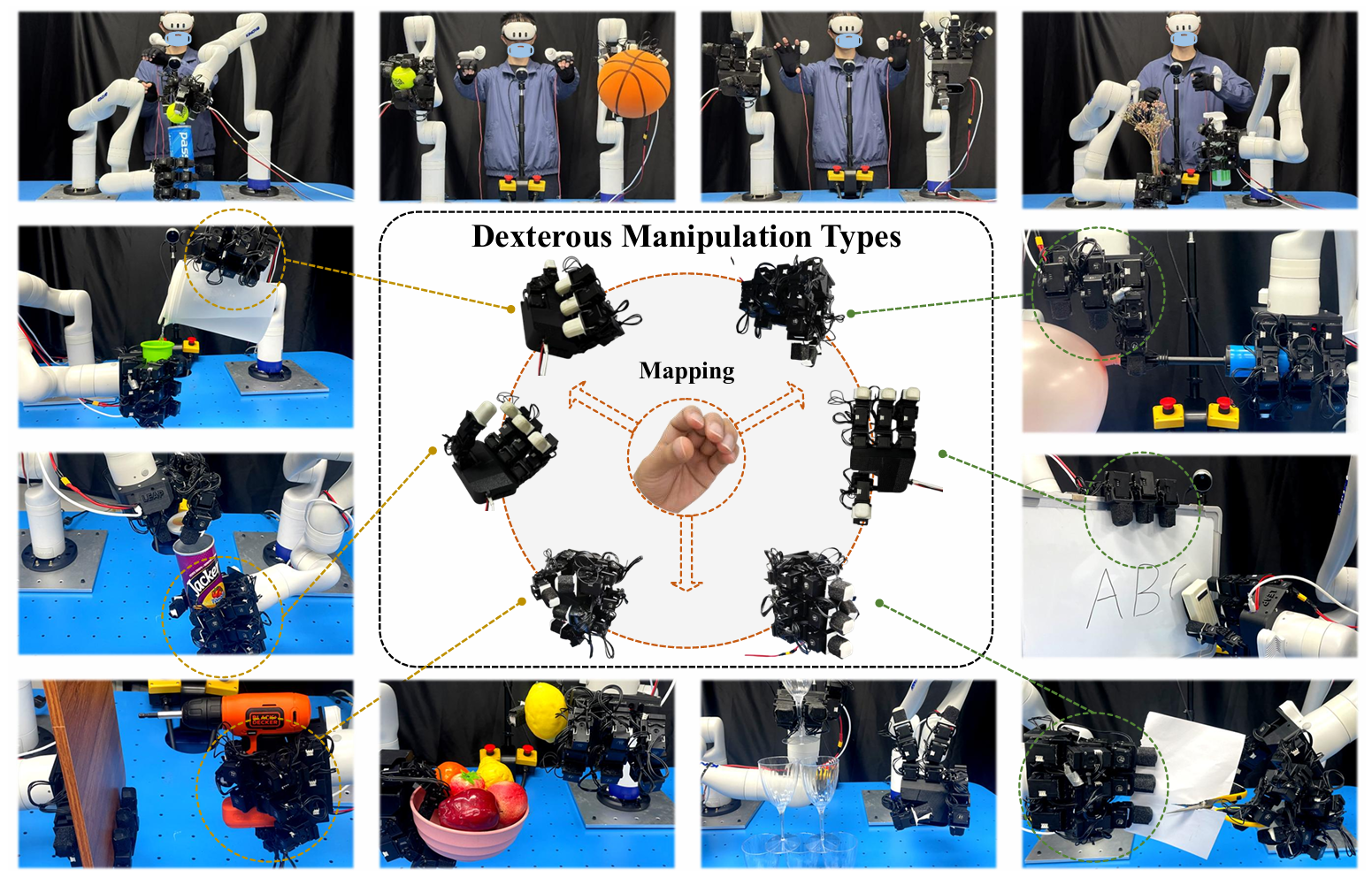
TypeTele: Releasing Dexterity in Teleoperation by Dexterous Manipulation Types
A novel task enables robots to perform dexterous grasping based on human commands.
|
|
TacCap: A Wearable FBG-Based Tactile Sensor for Seamless Human-to-Robot Skill Transfer
A wearable FBG-Based tactile sensor which can transfered form human to robot.
|
|
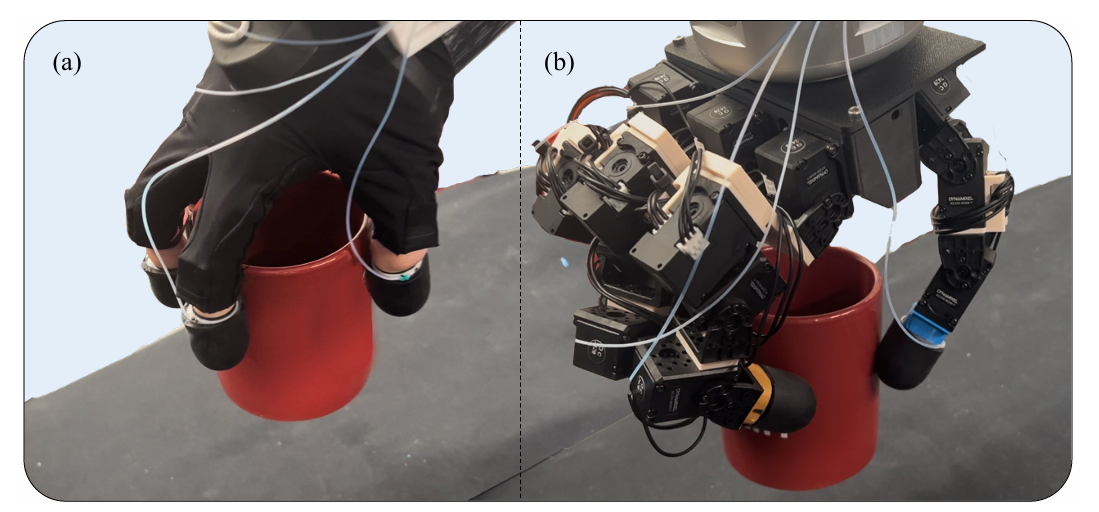
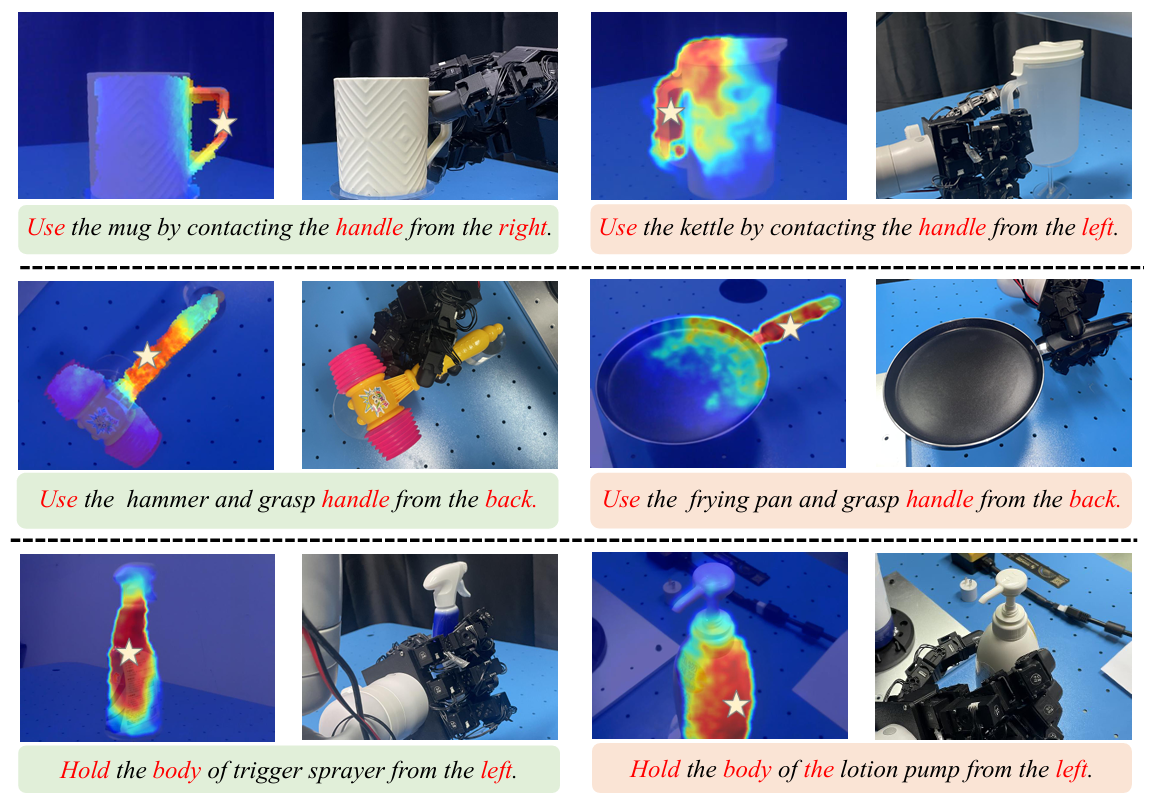
AffordDexGrasp: Open-set Language-guided Dexterous Grasp with Generalizable-Instructive Affordance
Open-Set Language-guided dexterous grasp based on generalizable-instructive Affordance.
|
|
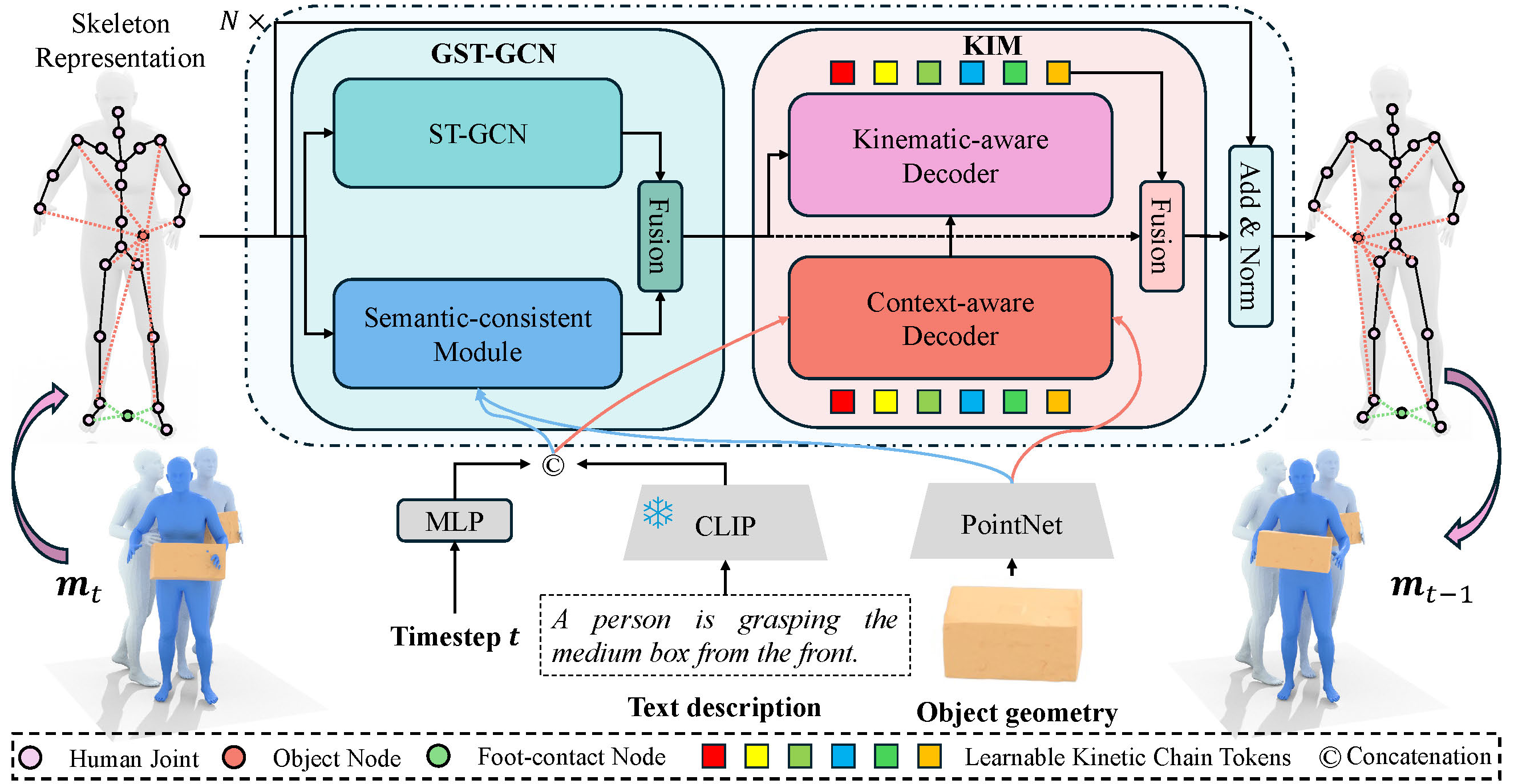
ChainHOI: Joint-based Kinematic Chain Modeling for Human-Object Interaction Generation
Human-Object interaction generation by joint-based kinematic chain modeling
|
|
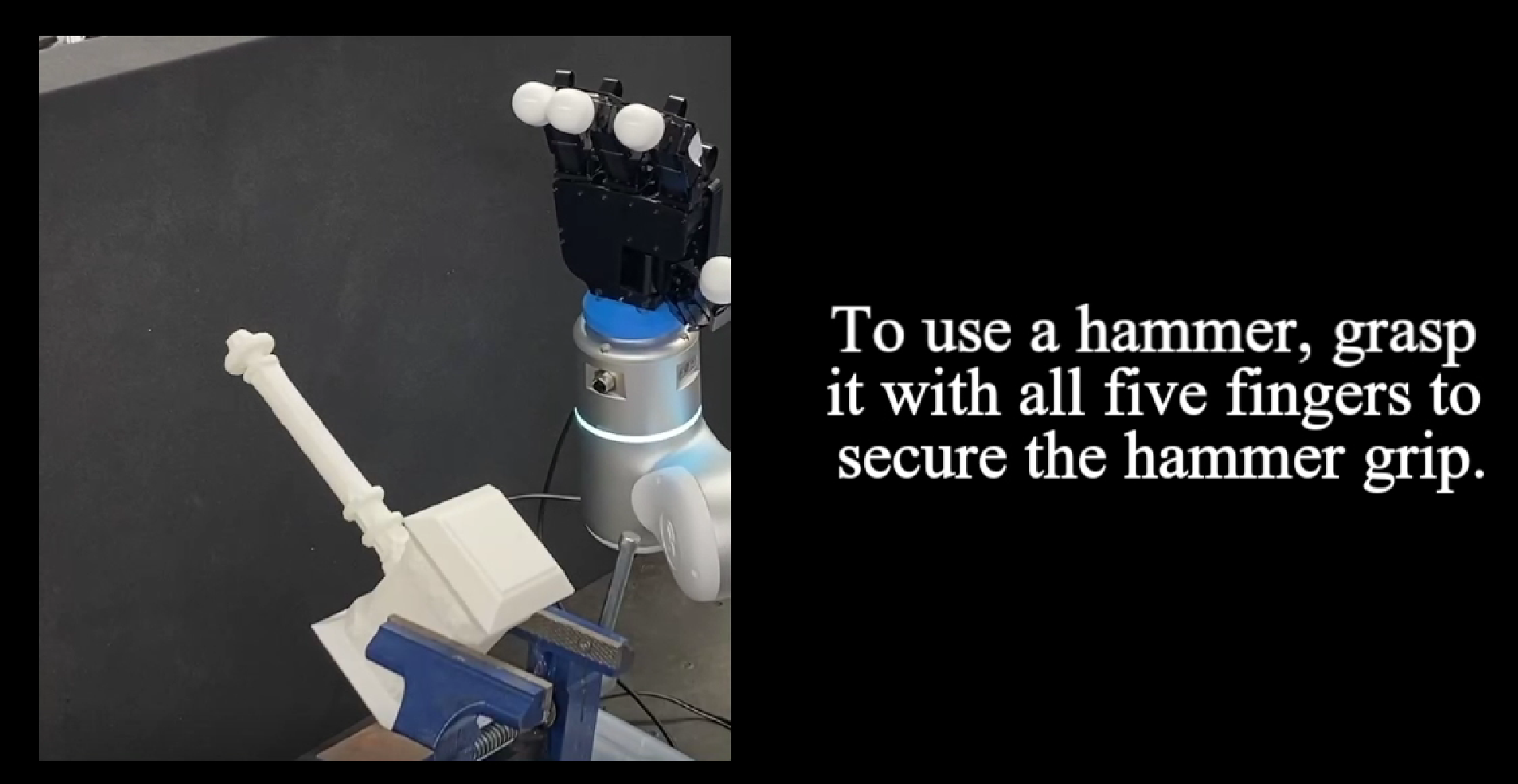
Grasp as You Say: Language-guided Dexterous Grasp Generation
A novel task enables robots to perform dexterous grasping based on human commands.
|
|
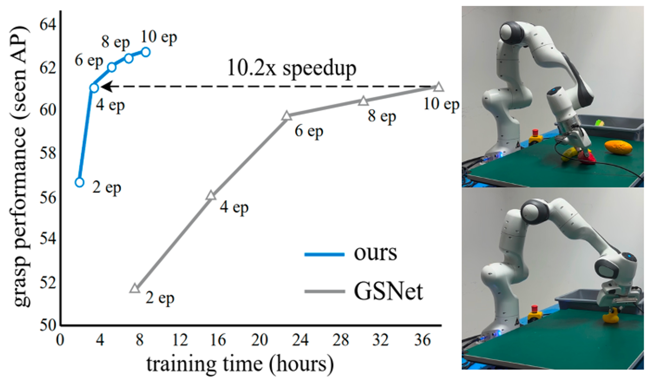
An Economic Framework for 6-DoF Grasp Detection
A new economic grasping framework for 6-DoF grasp detection to economize the training resource cost and meanwhile maintain effective grasp performance.
|
|
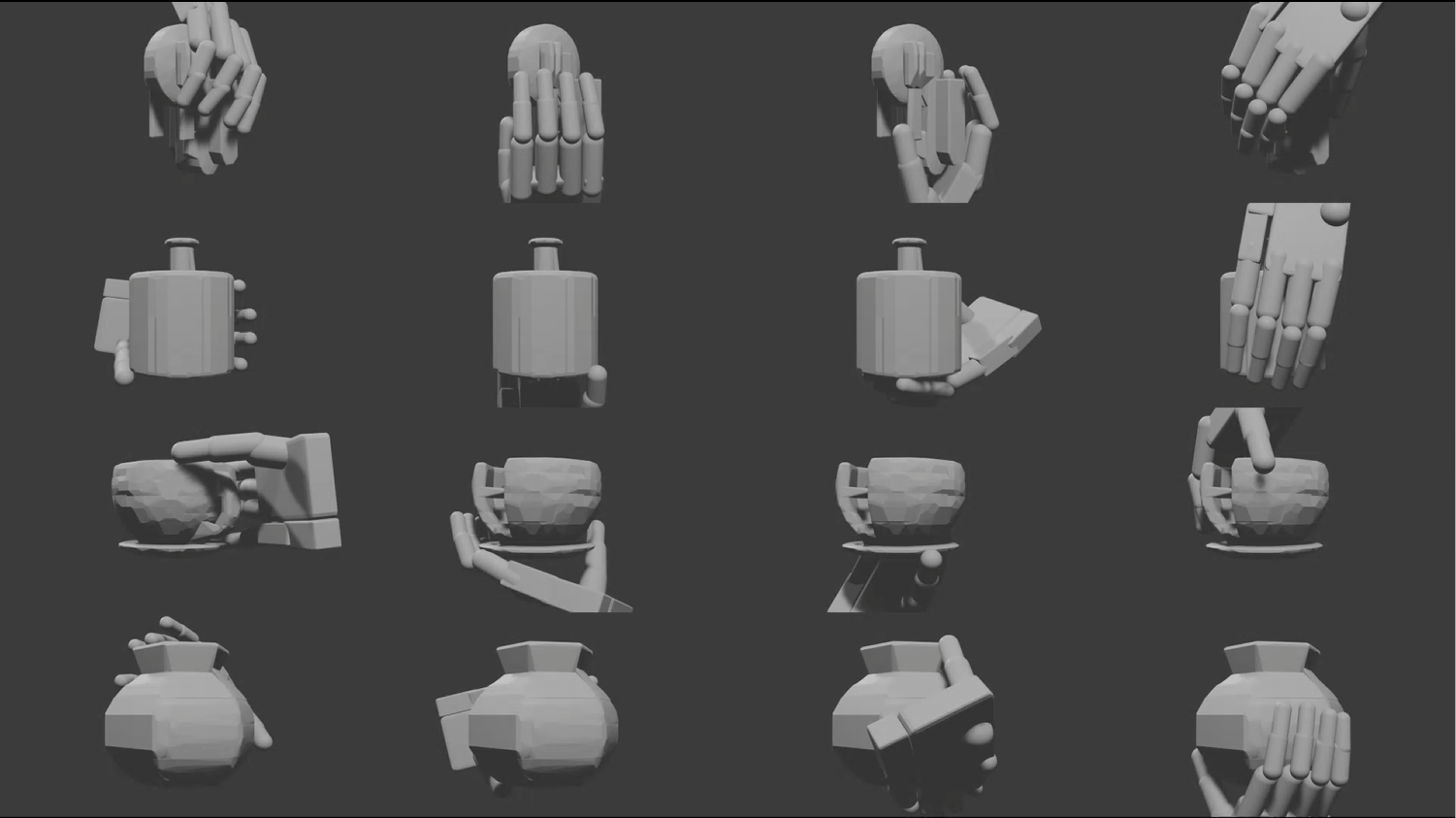
Dexterous Grasp Tranformer
A novel discriminative framework for dexterous grasp generation by formulating it as a set prediction task.
|
Academic ServicesConference Reviewer: CVPR 2025-2026, NeurIPS 2024-2025, ICLR 2025-2026, ICML 2025-2026, ICCV 2025, ECCV 2026, CoRL 2025, IROS 2026. Journal Reviewer: RA-L. |